SimuLIDAR
Find out more at: github
SimuLIDAR is a 2D LIDAR scanner simulation tool developed with OpenCV. It allows you to simulate the operation of a LIDAR on a black-and-white floor plan or similar map. Noise is introduced to the simulated measurements so that the data more closely reflects real-world scanner behavior.
Measurements from the simulated scanner are then processed to extract structural features, producing a reconstructed map of the environment. The workflow includes generating a point cloud from the simulated readings, applying Canny edge detection to locate boundaries, and using the Probabilistic Hough Line Transform to identify dominant lines.
Below is an example of the process, starting with a raw input map. The tool outputs a point cloud of simulated measurements, detects edges on the cloud, and finally reconstructs the environment:
The input map:
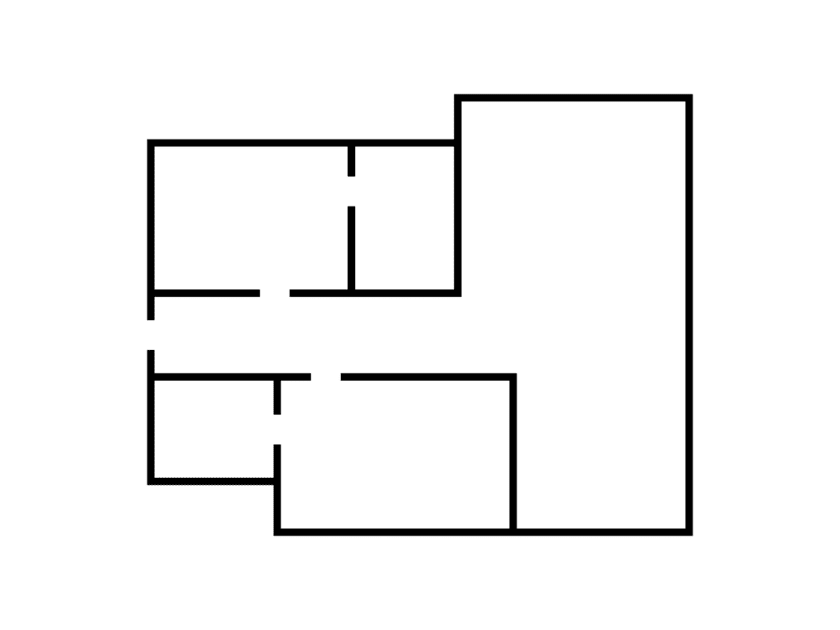
The point cloud generated from LIDAR scans:
Edges detected on the point cloud:
The final reconstructed environment:
This simulation reproduces several key steps of a real LIDAR pipeline. It accounts for measurement noise, transforms raw angle-range data into a point cloud, and applies computer vision methods to identify and visualize structural elements. In doing so, SimuLIDAR demonstrates how a LIDAR-like sensor can be approximated and processed within a purely virtual environment.
This project is licensed under the MIT License. See the LICENSE file for details.